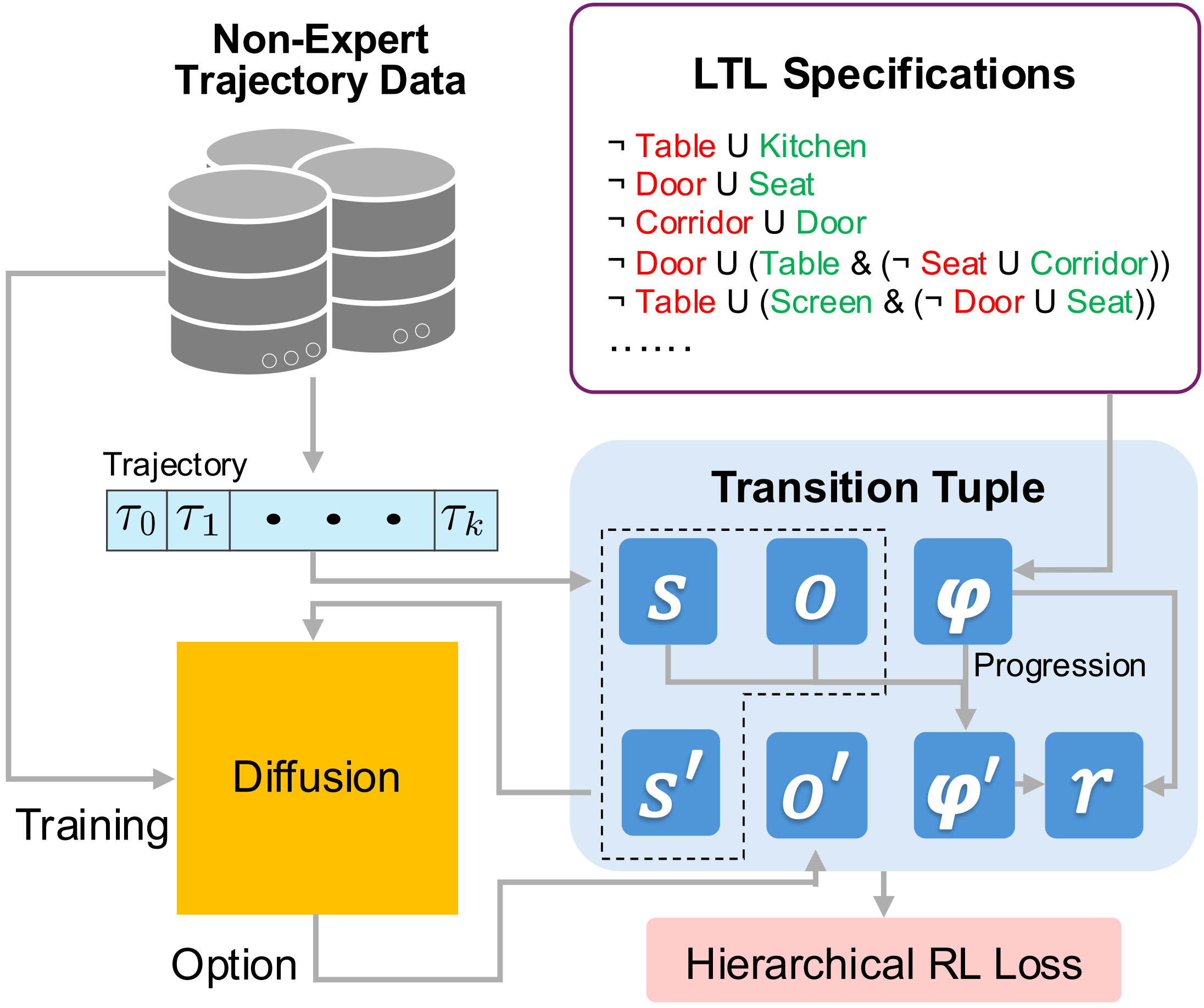
DOPPLER (Diffusion Option Planning by Progressing LTLs for Effective Receding-horizon control) is an offline hierarchical reinforcement learning framework that generates receding horizon trajectories to satisfy given LTL instructions. It leverages diffusion models to represent options within the hierarchical RL framework, and can generate diverse and expressive behaviors while ensuring that the generated trajectories remain within the support of the offline dataset.